map aniMotum-estimated locations and behavioural indices with coastline and projection options
Arguments
- x
a
aniMotumssm fit object with classssm_dfor (old)fG_ssm- y
optionally, a
aniMotummpm fit object with classmpm_dfor (old)fG_mpm- what
specify which location estimates to map: fitted, predicted or rerouted
- aes
a list of map controls and aesthetics (shape, size, col, fill, alpha) for each map feature (estimated locations, confidence ellipses, track lines, observed locations, land masses, water bodies). Constructed by
aes_lst()and can be modified for custom maps (see examples)- by.id
when mapping multiple tracks, should locations be coloured by id (logical; default = TRUE if
nrow(x) > 1else FALSE; ignored if behavioural index provided)- by.date
when mapping single tracks, should locations be coloured by date (logical; default = FALSE; ignored if behavioural index provided)
- crs
proj4stringfor re-projecting locations, if NULL the default projection (Mercator) for the fitting the SSM will be used- ext.rng
proportion (can exceed 1) to extend the plot range in x and y dimensions
- buffer
distance (in km) to buffer locations for subsetting land polygons (default = 10000). If map extents are expanded by many factors then the buffer distance may need to be increased, otherwise this should not be used. Ignored if
map_type != "default".- map_type
background map type ("default" uses rnaturalearth::ne_countries to add land polygons). If the
rnaturalearthdatapackage is installed then high-resolution land polygons will be used. If theggspatialandrosmpackages are installed then any tile map type returned by rosm::osm.types can be used for a potentially more detailed coastline at fine spatial scales, given appropriate zoom settings (see ggspatial::annotation_map_tile for details).- normalise
logical; if output includes a move persistence estimate, should g (the move persistence index) be normalised to have minimum = 0 and maximum = 1 (default = TRUE).
- group
logical; should g be normalised among individuals as a group, a 'relative g', or separately to highlight regions of lowest and highest move persistence along a track (default = FALSE).
- silent
logical; generate maps silently (default = FALSE).
- ...
additional arguments passed to ggspatial::annotation_map_tile
Value
a map as a ggplot2 object
Examples
# create an ssm fit object
fit <- fit_ssm(ellie, model = "rw", time.step = 24, control = ssm_control(verbose = 0))
#>
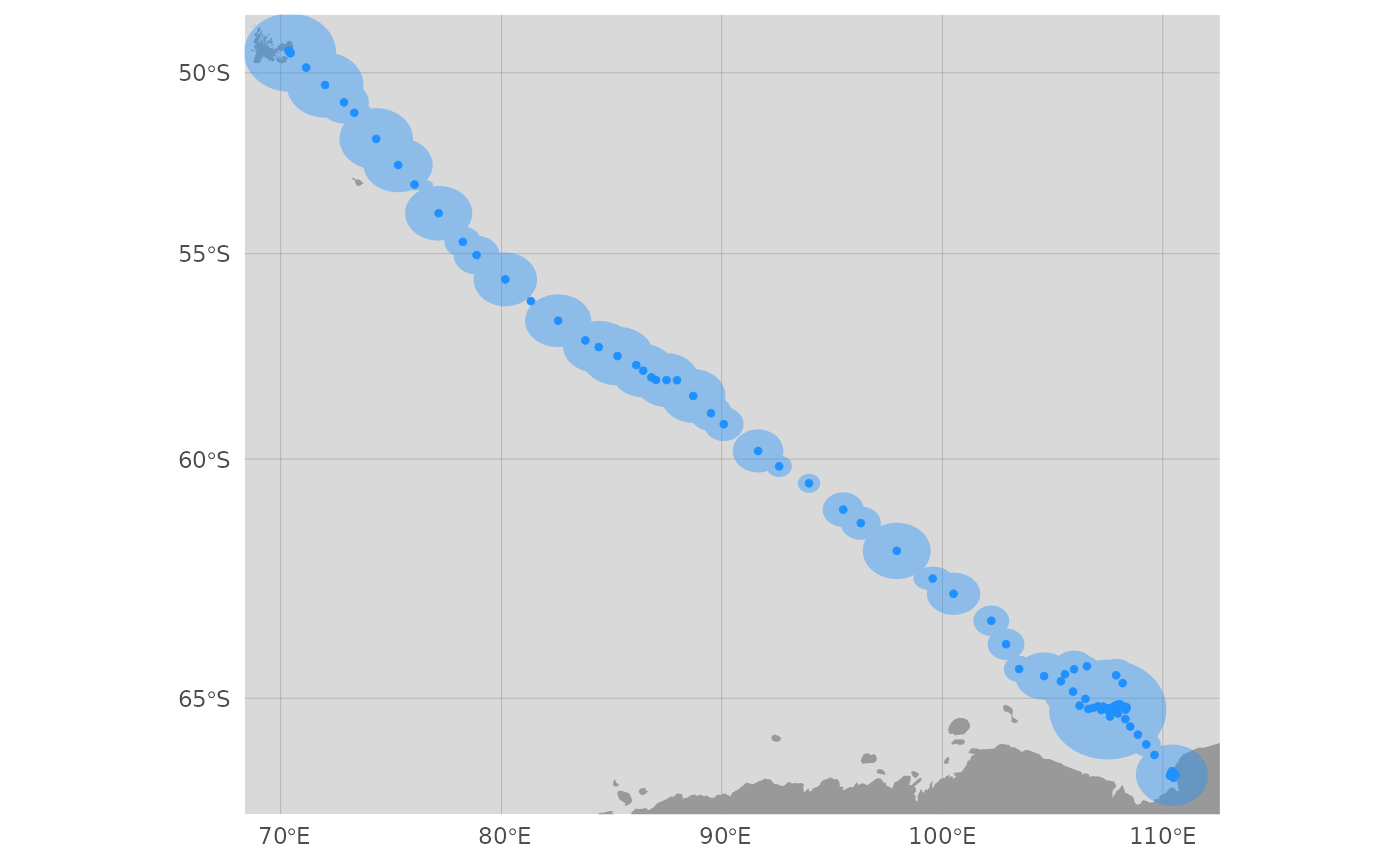
# render default map
map(fit, what = "p")
#> using map scale: 10